Magnetic Modulator:
The most reliable substitutes for electromechanical choppers are magnetic modulators. These devices reach a null stability as low as 10 μV, but their response time is often less than 2 Hz and the ambient temperature range is restricted. The 3-leg saturable reactor, shown in Fig. 14.32 falls within the category of magnetic modulator devices. A magnetic modulator is based on the principle of saturation. If dc product is applied to windings L1 and L2, the core will be saturated according to the B-H loop characteristics.
As shown in Fig. 14.32, L2 is the ac excitation winding and L1 – L3 are the dc winding.
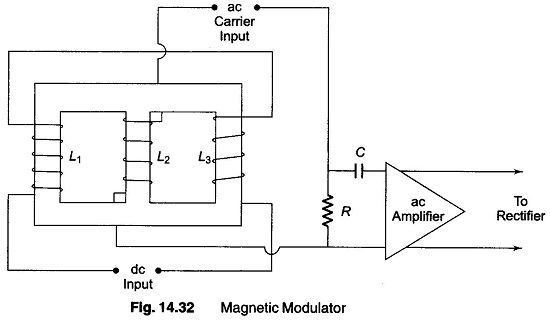
A given degree of magnetic saturation causes a change of inductance in L2. If no dc voltage is applied to the reactor, the impedance of L2 will set the value of a given ac current flowing through it. Now if dc voltage is applied, it causes an increase in the core saturation changing the L2 impedance characteristics which in turn causing a change in ac current seen by the follow-up ac amplifier.
The dc excitation windings are connected in Buck type configurations. This configuration prevents the ac current to enter the dc windings by transformer action.