Advantage and Disadvantage of Stepper Motors:
Advantage and Disadvantage of Stepper Motors are as follows;
Advantages
- They are compatible with digital systems and do not require digital to analog conversion at the input, as do conventional servos, when used with digital systems or a computer.
- While simple open-loop control is good enough for the control of position and speed, it can also be used in closed loop position and speed control systems with either analog or digital feedback.
- A wide range of step angles is available off-the-shelf from most manufacturers, in the range of 1.8 to 90°. The range of torque is from 1 μNm (tiny wristwatch motor) to 50 Nm (machine tool applications).
- Bidirectional control is available.
- Maximum torque occurs at low pulse rates. The stepper motor can, therefore, accelerate its load easily.
- Low speeds are possible without a reduction gear.
- Moment of inertia is usually low.
- The starting current is low.
- Multiple stepper motors driven from the same source can maintain perfect synchronisation.
Disadvantages
- Efficiency is low.
- Proper matching between load, motor and its drive is required.
- Resonance can be a problem with variable reluctance motors.
Torque vs Stepping (or Pulsing) Rate Characteristics:
These are important to know for, the proper use of stepper motors and are shown in Fig. 8.8. As the stepping rate is increased, rotor has less time available to drive the load from one position to the next. Beyond a certain pulsing rate, rotor cannot follow the command and begins to miss pulses.
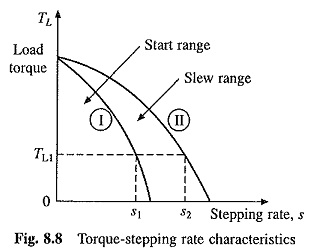
If the values of load torque and pulsing rate are such that the point of operation lies to the left of curve I, then the motor can start and also synchronise without missing a pulse. For example for the load torque TL1, the motor can start and also synchronize without missing a pulse if the stepping rate is less than s1. Once the motor has started and synchronised, the stepping rate can be increased for the same load torque without missing a step. For load torque TL1 after starting and synchronisation, the stepping rate can be increased up to s2 without missing a step or without loosing synchronism. However, if the stepping rate is increasing beyond s2 then the motor will loge synchronism. Thus, area between curves I and II represents, for various torque values, the range of stepping rate which the motor can follow without losing a step provided it has already been started and synchronised before hand. This area is known as Slew Range and the motor is said to operate in Slewing Mode.
Slew range is useful for speed control and it is not suitable for position control. At the stepping rate corresponding to slew range, the motor cannot be started or reversed without losing steps. To attend slewing speed, whether from rest or from bidirectional mode, the motor must first be accelerated carefully using a lower pulse rate.
Similarly, to stop or to reverse in slewing range, motor must first be carefully decelerated to some speed within its bidirectional capability. Such acceleration and deceleration operation without losing any step is called ramping.