Stepper Motor Applications:
The microprocessors are employed for the control of stepper motors which are generally used as position actuators. Some other Stepper Motor Applications are to drive floppy discs, numerical control of machine tools, X-Y plotters etc. The ease with which these can be controlled using microprocessor has made them very popular in the applications cited above. The speed and position control using the stepper motor can be achieved without expensive feedbacks. A typical stepper motor has several stator phases. The rotor is a toothed structure. It may be sometimes a permanent magnet. Energising the phases in a sequence by direct current imparts the rotor a discrete step motion. The resolution of a typical motor is good if only it has large number of teeth on stator and rotor. The phases of a stepper motor are excited by pulses, each pulse being capable of providing rotor motion in smaller angles. The angular rotation depends on the steps of the motor per revolution. If a motor has 400 steps/rev, the angle by which it moves in a step is 0.9°.
Electronic circuits are used to excite the stator phases from dc supply. Now a days, semiconductor devices such as thyristors and transistors are slowly replacing the mechanical and electronic controls using vacuum tubes. The necessary logic whith was expensive even with the introduction of semiconductor devices and electronic circuits has become easy and economical using microprocessors and digital circuits. The microprocessor has actually made a stepper motor and its control economically feasible.
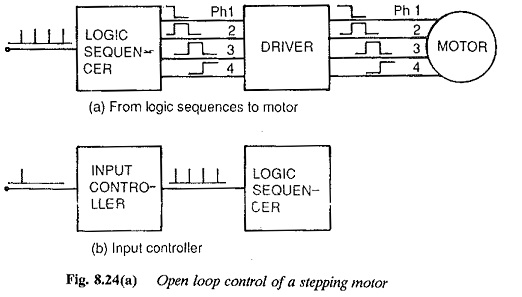
Open loop control of Stepper Motor Applications is the simplest method accomplished by means of step command pulses obtained from an external source. The motor is excited by these pulses and is expected to follow every pulse. This kind of control of stepper motor is very attractive and has wide acceptance in applications of speed and position control. The method has economic advantages. However it has its own limitations. The response of the motor to a given input command may become oscillatory or even unstable in some speed ranges. The control of the motor is not very fast due to this behaviour. To make the motor widely applicable it is necessary to improve the performance. A Stepper Motor Applications may fail to follow the pulse when the frequency of the pulses is high or the load inertia is very large, Because of these reasons the open loop operation is only limited. The open loop control of the motor is depicted in Fig. 8.24(a). For most of the application open loop control is suitable.
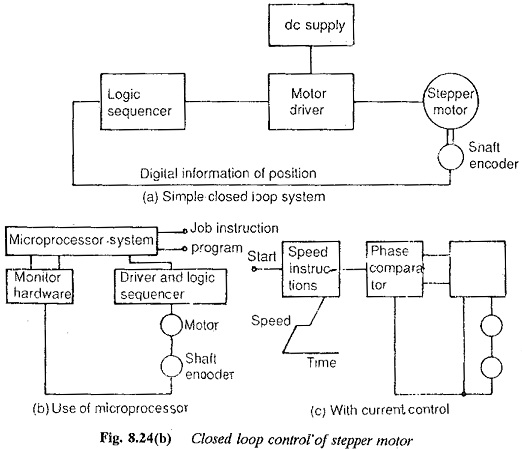
On the other hand a closed loop control of Stepper Motor Applications is also possible where the switching of the motor takes place by means of the input pulse train using the position or speed feedback from the rotor. The closed loop control improves the performance of the Stepper Motor Applications. The disadvantages of open loop control are not present. No step failure occurs, the response is quicker and the motion is smoother. The control is free from instability and capable of quick acceleration. A position sensor senses the rotor position and provides the information necessary for the control of the motor. A mechanical rotor position sensor with an optical encoder coupled to the shaft is used. The rotor position may also be determined using the machine voltages and currents. The motor position is monitored and a step completed. The closed loop control is employed when the maximum torque is required of a given motor and also when absolute step integrity is required. The cost of the system depends on the type of position sensor used. A closed loop control of the motor is shown in Fig.8.24(b).
The Stepper Motor Applications in situations where two or more motors are required with independent or interactive running. The former is the simplest case. Every motor has its own control circuit. The open loop controllers are available commercially. The controllers may employ microprocessors.
The interactive control of the stepper motor is typically employed in places where the speed of the motors must be the same. One such example is the glass industry. If the speeds are not equal stretching of glass takes place. In the textile industry also the Stepper Motor Applications are used in the interactive control to run at constant speed to avoid fabric tension and damage, when fabrics are wound. Careful synchronisation of the running of the motors is required.
Another example of interactive control is in robotics. The control of the robot manipulator requires simultaneous control of several motors. Here the motors may not run at the same speed. The operation of one motor affects the other motors. Therefore there can be interactive control where no synchronisation is required, but a control is required to make the operation satisfactory with mutual effects of several motors.
The open loop control can be easily employed for interactive control of the motors also. The operation of the motors is however limited by the considerations of stability. When the load conditions are varying open loop control of several motors in interactive mode becomes difficult when stability Is also to be assured. The possible solution is closed loop control with a common feedback control of the motors.
The synchronisation of two motors using single closed loop control strategy leads to instability. However a motor can be made to follow the velocity profile of the other with a suitable delay. This kind of operation however has limited applications. The closed loop control of robot motors in the interactive mode requires the knowledge of robot geometry. Microprocessors can be advantageously employed in complicated controls.
The stepper motors find application in computer peripherals. A few of the devices employing stepper motors are
- Serial printers in typewriters or word processor systems
- Linear stepper motors to printers
- X-Y plotters
- Floppy disc drives
- Numerical control of machine tools such as X-Y tables and index tables, milling machines, automatic drafting machine driven by a linear motor etc.
An X-Y table is a device operated by two motors working to move the object in two perpendicular directions independently. These are used to position the object for machining. In milling machines the movement of the object is required in three different directions which is accomplished by the stepper motors. Due to the oscillatory behaviour of the stepper motor the finish of the surface is not comparable to that obtained with dc servomotor control.
The oscillatory motion of the motor in the open loop mode must be given due consideration to have satisfactory control. Closed loop control may also be necessary.
The other Stepper Motor Applications are in space crafts launched for scientific exploration of planets. These are used to point the instruments such as T.V, cameras, ultra violet spectrometers at the desired objects. The scan actuator shaft position must be very precisely known to control the motors. This is obtained by means of feedback and telemetry potentiometers. The shaft and these potentiometers are geared together. The gear is highly precise with anti backlash.