Electric Drive Motor:
Motion control is required in large number of industrial and domestic applications like transportation systems, rolling mills, paper machines, textile mills, machine tools, fans, pumps, robots, washing machines etc. Systems employed for motion control are called drives and may employ any of the prime movers such as, diesel or petrol. engines, gas or steam turbines, steam engines, hydraulic motors and electric motors, for supplying mechanical energy for motion control. Drives employing Electric Drive Motor are known as Electrical Drives.
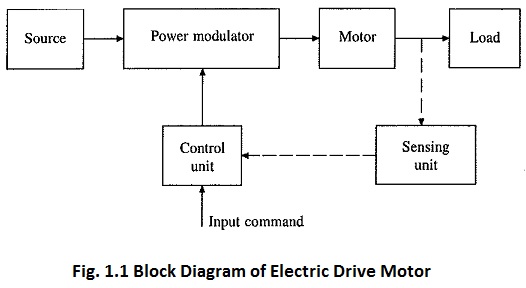
Block diagram of an Electric Drive Motor is shown in Fig 1.1. Load is usually a machinery designed to accomplish a given task, e.g. fans, pumps, robots, washing machines, machine tools, trains and drills. Usually load requirements can be specified in terms of speed and torque demands. A motor having speed-torque characteristics and capabilities compatible to the load requirements is chosen.
Power modulator performs one or more of the following four functions:
- Modulates flow of power from the source to the motor in such a manner that motor is imparted speed-torque characteristics required by the load.
- During transient operations, such as starting, braking and speed reversal, it restricts source and motor currents within permissible values; excessive current drawn from source may overload it or may cause a voltage dip.
- Converts electrical energy of the source in the form suitable to the motor, e.g. if the source is dc and an induction motor is to be employed, then the power modulator is required to convert dc into a variable frequency ac.
- Selects the mode of operation of the motor, i.e. motoring or braking.
When power modulator is employed mainly to perform function (iii), it is more appropriately called converter. While (iii) is the main function, depending on its circuit, a converter may also perform other functions of power modulator.
Controls for power modulator are built in control unit which usually operates at much lower voltage and power levels. In addition to operating the power modulator as desired, it may also generate commands for the protection of power modulator and motor. Input command signal, which adjusts the operating point of the drive, forms an input to the control unit. Sensing of certain drive parameters, such as motor current and speed, may be required either for protection or for closed loop operation.
Advantages of Electric Drives:
Electrical Drives are widely used because of the following advantages:
- They have flexible control characteristics. The steady-state and dynamic characteristics of electrical drives can be shaped to satisfy load requirements. Speed can be controlled and, if required, can be controlled in wide limits. Electric braking can be employed. Control gear required for speed control, starting and braking is usually simple and easy to operate. Availability of semiconductor converters employing thyristors, power transistors, IGBTs and GTOs, linear and digital ICs, and microcomputers have made the control characteristics even more flexible. It is possible to reshape characteristics of drives almost at will to meet load requirements in an optimum manner. Speed and torque, and transitions from one mode to another can be controlled smoothly and steplessly. Optimal control strategies can be implemented to achieve high dynamic performance, high efficiency or to minimime a suitable performance index. Drives can be provided with automatic fault detection systems. Programmable logic controllers and computers can be employed to automatically control the drive operations in a desired sequence.
- They are available in wide range of torque, speed and power.
- Electric Drive Motor have high efficiency, low no load losses and considerable short time overloading capability. Can be made in variety of designs to make them compatible with load. Compared to other prime movers they have longer life, lower noise, lower maintenance requirements and cleaner operation.
- They are adaptable to almost any operating conditions such as explosive and radioactive environment, submerged in liquids, vertical mountings, and so on.
- Do not pollute the environment.
- Can operate in all the four quadrants of speed-torque plane. Electric braking gives smooth deceleration and increases life of the equipment compared to other forms of braking. When regenerative braking is possible, considerable saving of energy is achieved. These features are not available in other prime movers.
- Unlike other prime movers, there is no need to refuel or warm-up the motor. They can be started instantly and can immediately be fully loaded.
- They are powered by electrical energy which has a number of advantages over other forms of energy. It can be generated and transported to the desired point economically and efficiently. Conversion of electrical to mechanical energy and vice versa, and electrical energy from one from to another can also be done efficiently and economically.
Because of the above advantages, the mechanical energy already available from a nonelectrical prime mover is sometimes first converted into electrical energy by a generator and back to mechanical energy by an Electric Drive Motor. Electrical link thus provided between the nonelectrical prime mover and the load imparts to the drive flexible control characteristics. Consequently, the load requirements are fully met. For example, in diesel-electric locomotive and ship, the mechanical energy produced by diesel engine is converted into electrical energy by an electrical generator and is utilised to drive electric motors which drive locomotive and ship. The operations of generator and motors can be controlled to shape speed-torque curves and other parameters to meet traction or propulsion requirements in the best possible manner.