Thyristorised Control of DC Electric Traction Motor:
The modern trend is towards the use of dc motors (both separately excited and dc series motors) equipped with thyristor chopper control. The operating voltages are 600 V or 1,000 V. Braking’s employed are mechanical, rheostatic and regenerative. Thyristorised Control of DC Electric Traction converters provide accurate control and fast response. Main advantages of thyristor control are the absence of bulky on-load tap changer and electromagnetic devices, saving of energy, notchless control, incease in pulling ability of the motive power, and minimum wear and tear because of absence of conventional moving parts in the motor control circuits.
In addition to ordinary phase control methods, cycle selection methods of control of SCR for varying the voltage applied to the traction motors are also employed. In this method the required average voltage is obtained by accepting or rejecting a certain number of complete half cycles. In practice, at the start only one half cycle out of eight is accepted and as the speed builds up, it is gradually raised to 2/8, 3/8 and finally 8/8 for full-power operation. This method is advantageous due to low frequency harmonics, low rate of rise of current, better power factor etc.
In chopper control of traction motors, at start, the ‘on’ period of pulse is kept very short which lengthens during the period of controlled acceleration. Thus the average voltage applied across the traction motors is gradually increased keeping the mean value of the input current close to the desired value.
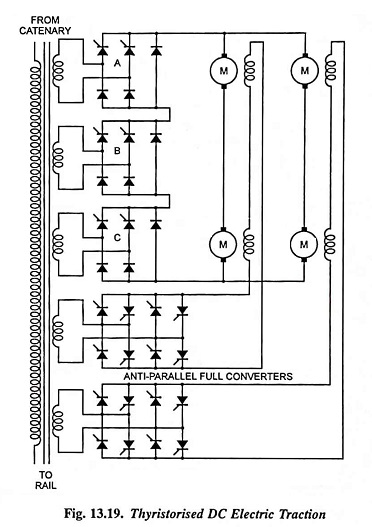
Figure 13.19 shows a typical thyristorised control of DC electric traction system supplying a group of four separately excited motors. The armatures are supplied from half controlled bridge converters. However, it is desirable to feed the field windings through fully controlled bridge converters so as to reduce the ripple in the field current. Low ripple in the field current ensures low iron losses in the machines. However, if regenerative braking is required then the armatures should be supplied from fully controlled bridges. Freewheeling diodes are connected as illustrated to ensure good waveform of armature current.
The armatures are connected in series-parallel arrangement to ensure good starting and running characteristics. It is seen that armatures are supplied by three bridges connected in series. For starting first only bridge A is triggered and firing angle is advanced as speed builds up. When bridge A is fully conducting (i.e., when α = 0), bridge B is triggered and then bridge C is triggered. During starting field currents are set to maximum to provide high starting torque. The use of three bridges ensures better power factor than would be possible with a single bridge.