Electric Motor Characteristics:
The machine and the load are the two components of an electro-mechanical energy-conversion system, and the Electric Motor Characteristics, generally, play a predominant part in the operating behavior of the complete system.
In choosing an electric motor its speed-torque characteristic is needed to be known to a fair degree of accuracy and further it has to be properly matched to the Electric Motor Characteristics of the mechanical load. Figure 5.59 shows the speed-torque characteristic of an induction motor with a fan-type load (load torque roughly proportional to square of speed). The steady operating point is the intersection point P of the two Electric Motor Characteristics. As can be seen from Fig. 5.59, it is a stable operating point and the machine-load system returns to it when subjected to a short-duration disturbance.

The Characteristics of Mechanical Loading can be classified as below:
1. Constant Speed Loads:
These can be of two kinds. Certain loads require approximately constant speed as the load torque varies, e.g. machine tools, hydraulic pumps, fans, etc. Certain special loads like paper mill drives require exactly a constant speed independent of the load torque.
2. Variable Speed (or constant kW) Loads:
Certain loads, such as cranes, hoists and other traction-type drives, demand high torque at low speeds and low torque at high speed so that the kW demanded from the mains remains substantially constant. This nature is imparted to the load wherever heavy inertias are to be accelerated.
3. Adjustable Speed Loads:
These are of a constant adjustable speed kind as in certain machine tool applications or of a variable adjustable speed kind as in cranes. The range of speed adjustment in certain drives can be highly demanding.
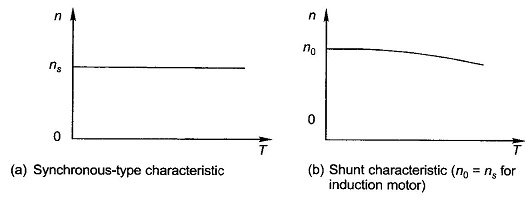
The Electric Motor Characteristics can be classified as:
1. Constant Speed Motor Types:
The speed remains exactly constant independent of torque as in Fig. 5.60(a). This Electric Motor Characteristics is possessed by the synchronous motor.
2. Shunt Type:
Here the motor speed drops by a few per cent from no-load to full-load as in Fig. 5.60(b). The ac induction motor (over the operating region) and dc shunt motor both possess this characteristic.
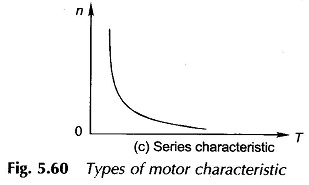
3. Series Type:
Here the speed rises sharply as the load torque reduces as in Fig. 5.60(c). This type of Electric Motor Characteristics is possessed by a dc series motor ideally suitable for traction-type loads.
The accelerating (starting) and decelerating (braking) characteristics of motor-load systems are also of equal importance in their industrial applications. The system should be capable of coming to full speed from rest and be able to be stopped in an acceptable time period. These requirements are stringent in starting on-load and in fast braking and reversal in certain special applications (rolling mill drives). A motor has three regions of operation—generating, motoring and braking. In generating region it returns the decelerating intertial energy back to electric main preventing the system from acquiring dangerously high speeds—as in lowering a hoist or downthe-gradient traction. In braking region the machine absorbs mechanical energy (as well as some electric energy) the form of losses in it appearing as heat. A dc motor offers excellent starting and braking characteristics, much superior to those of an ac induction motor.
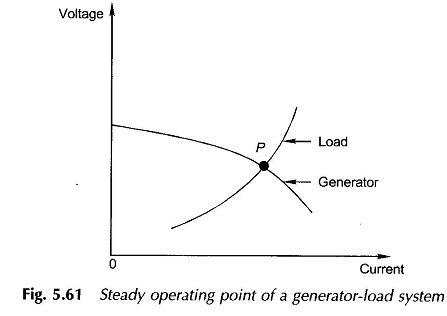
Similar to the case of motors, the operating point of a generator-load system is determined by the Electric Motor Characteristics of the two as shown in Fig. 5.61 for a dc shunt generator. Similar is the case with ac (synchronous) generators. In modern systems, generators operating in parallel feed loads spread over geographically wide areas through transmission lines. The system must meet the requirement of a substantially constant voltage as load varies over a wide range. A captive generator feeding a single motor is used in certain speed-control schemes in which the terminal voltage may be required to vary in a peculiar fashion.
It is therefore seen that among the features of great importance are the torque-speed characteristic of a motor and the V-I characteristic of a generator. Equally important can be the limits through which these characteristics can be varied.