Reversible Drives using Phase Controlled Converters:
When speed control in both forward and reverse directions is required a Reversible Drives is used. In several applications the speed reversal may be required very frequently in which case a regenerative reversal may be advantageous. The drive is very efficient as the kinetic energy of rotating parts is returned to the supply.
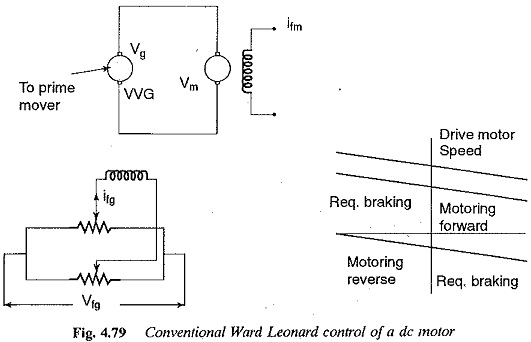
The conventional Ward Leonard control (Fig. 4.79) is extensively used where smooth speed control in either direction is required. The drive is capable of operation in all the four quadrants. A regenerative speed reversal is possible by adjusting the field of variable voltage generator. The acceleration and deceleration can be controlled at constant current. The kinetic energy of the rotating parts can be fed back to the supply.
The major disadvantages of this system are
(a) high initial cost,
(b) large space requirement and
(c) low efficiency of the drive.
Reversible Drives using Phase Controlled Converters:
The advent of thyristor power converters has made static speed control of dc motors very popular. A two quadrant converter is used where regeneration is required. Due to unidirectional current carrying property of thyristors the two quadrant operation is achieved by changing the polarity of voltage retaining the direction of current. However for reversing the direction of rotation and achieving the speed control in the reverse direction, one should be able to reverse the direction of armature current with the voltage variation from a positive maximum to negative maximum. A static ward Leonard scheme is possible with the help of static power converters having the features of regenerative speed reversal.
The speed of a dc motor can be reversed by changing
1.the direction of armature current.
2.the direction of field current.
The reversal of current can be achieved by using either mechanical contactors (change over switches) in conjunction with a two quadrant converter, or a dual converter, one feeding the motor in the forward direction and the other in the reverse direction. The possible ways of obtaining reversible drives are given in Fig. 4.80. Each of the drive system has its own merits and demerits.
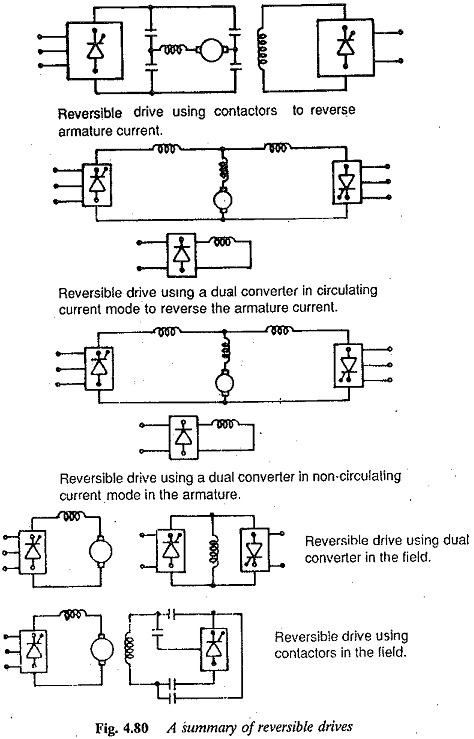
The field current reversal to obtain a reversible drives is cheaper and simpler compared to armature current reversal. This is because the power level to be handled by the converter is small. At weak field currents the commutation may pose problems. The time constant in the speed reversal is large for field current reversal. Field forcing may be employed to make the current reversal fast. The response of the drive is faster with armature current reversal than with field current reversal, even when field forcing is employed. Also, when compared on the basis of control circuits, the field current reversal is complex.
The reversal of the current may be achieved by mechanical change over switches or dual converters. The use of contactors is economical whereas the use of dual converters is costly. When frequent reversals are needed, there will be wear and tear on the contactors. Therefore frequent maintenance and replacement of the contactors may be required. In such cases a dual converter may be preferred so that the maintenance problem is minimised. The change over must take place at zero crossing of the current when the switches are uses. This gives a long life to the contactors. However a definite amount of time is required for the opening and closing of contactors.
When dual converters are employed, they may be operated in circulating current or circulating current-free mode. Current reversal is fast, particularly in circulating current mode. The changeover from motoring to generator is almost instantaneous in the case of the circulating current mode, as this mode makes one converter operate as a rectifier and the other as an inverter. In the case of circulating current-free mode a time lag of 20 ms may be required for change over, once the zero is detected.