DC Motor Reversing Switch Diagram:
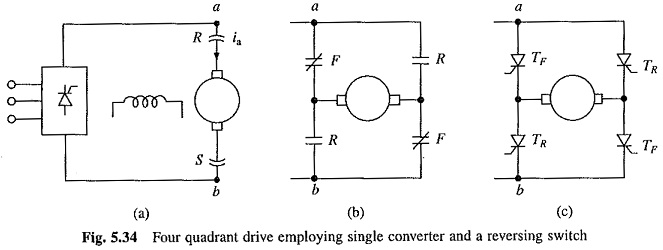
DC Motor Reversing Switch Diagram is shown in Fig. 5.34(a). A fully-controlled rectifier feeds the motor through a reversing switch RS which is used to reverse the armature connection with respect to the rectifier. A fully-controlled rectifier is capable of providing operation in quadrants I and IV. The reversal of the armature connection provides operation in quadrant III and II.
The DC Motor Reversing Switch Diagram may consist of a relay-operated contactor with two normally open and two normally closed contacts as shown in Fig. 5.34(b).
When slow operation and frequent maintenance associated with the contactor is not acceptable, reversing switch is realized using four thyristors as shown in Fig. 5.34(c). With thyristor pair TF on (and pair TR off) operation is obtained in quadrants I and IV and with pair TR on (and TF off) the operation is provided in quadrants III and II. In both the configurations of RS, the switching is done at zero current in order to avoid voltage spikes and to reduce its rating.
The speed reversal (transfer of operation from quadrant I to III or from quadrant III to I) is done as follows:
The firing angle of the rectifier is set at the highest value. It works as an inverter and reduces armature current to zero. After the zero current is sensed, firing pulses are stopped. A delay time of 2 to 10 ms is provided to make sure that the thyristors which were conducting have all fully turned off. Such long delay (compared to thyristor turn-off time which is of few hundred microseconds) is required in order to take care of errors in zero current sensing. Now the armature connection is reversed and firing pulses are released with the firing angle set at the highest value.
The current control adjust the firing angle continuously so as to brake the motor at the maximum allowable current from initial speed to zero speed and then accelerates the motor (again at the maximum allowable current) to the desired speed in the reverse direction.
The operation at the maximum current during speed reversal ensures braking and acceleration at the maximum motor torque ensuring fast reversal.