Discrete Time Signals and Linear Systems Interview Questions and Answers:
1. What do you understand by the terms: signal and signal processing?
Ans.
Signal: A signal is defined as any physical quantity that varies with time, space, or any other independent variable.
Signal processing: Signal processing is any operation that changes the characteristics of a signal. These characteristics include the amplitude, shape, phase and frequency content of a signal.
2. What is Deterministic signal? Give example.
Ans. A Deterministic signal is a signal exhibiting no uncertainty of value at any given instant of time. Its instantaneous value can be accurately predicted by specifying a formula, algorithm or simply its describing statement in words.
Example: υ(t) = A0sinω(t)
3. What is random signal?
Ans. A random signal is a signal characterized by uncertainty before its actual occurrence.
Example: Noise
4. Define (a) Periodic signal (b) Non-periodic signal.
Ans.
Periodic signal: A signal x(n) is periodic with period N if and only if x(n + N) = x(n) for all n.
Non-periodic signal: If there is no value of N that satisfies the above equation the signal is called nonperiodic or aperiodic.
5. Define symmetric and antisymmetric signals.
Ans.
Symmetric signals: A real valued signal x(n) is called symmetric if x(-n) = x(n).
Antisymmetric signals: On the other hand, a signal x(n) is called antisymmetric if x(-n) = -x(n).
6. What are energy and power signals?
Ans.
The energy of a discrete time signal x(n) is defined as
A signal x(n) is called an energy signal if and only of the energy obeys the relation 0 < E < ∞.
For an energy signal P = 0
The average power of a discrete time signal x(n) is defined as
7. Define the following (a) Analog signal (b) Discrete-time signal (c) Digital signal
Ans.
Analog signal: An analog signal is a function having an amplitude varying continuously for all values of time. Hence, an analog signal is continuous in both time and amplitude. Examples of analog signals are the sinusoidal function, the step function, output a microphone.
Discrete-time signal: A discrete-time signal is a function defined only at particular time instants. It is discrete in time but continuous in amplitude. An example is temperature recorded at regular intervals of time in a day.
Digital signal: A digital signal is a special form of discrete-time signal which is discrete in both time and amplitude, obtained by quantizing each value of the discrete-time signal. These signals are called digital because their samples are represented by numbers or digits. Examples of digital signals include the dot-dash Morse code, the output from a digital computer etc.
8. What are the different types of signal representation?
Ans. Signals are represented in various ways
(i) Graphical representation
(ii) Functional representation
(iii) Tabular representation
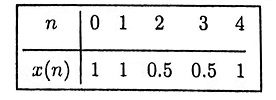
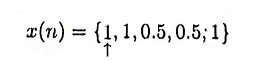
(iv) Sequence representation
9. Define the following signals (i) Unit sample sequence (ii) unit step signal (iii) unit ramp signal
Ans.
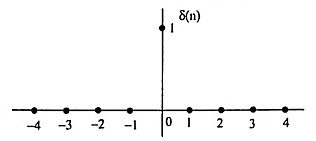
Unit sample sequence: The unit sample sequence is denoted as δ(n) and is defined as
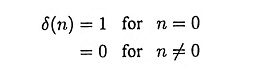
i.e., the unit sample sequence is a signal that is zero everywhere, except at n = 0.
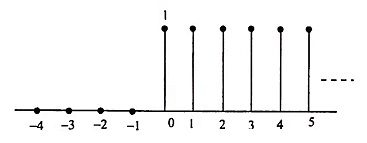
Unit step signal: A unit step signal is denoted as u(n) and is defined as
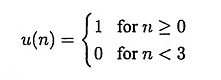
i.e., the unit step signal is a signal having unit magnitude for all n ≥ 0
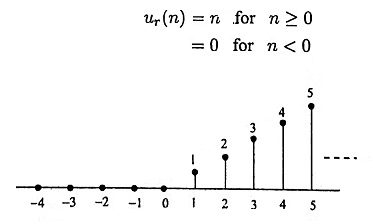
Unit ramp signal: A unit ramp signal is denoted as ur(n) and is defined as
10. Define the following (a) System (b) Discrete-time system
Ans.
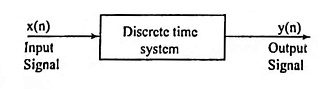
System: A system is defined as a physical device that performs an operation on a signal.
Discrete-time system: A discrete-time system is a device or algorithm that operates on a discrete-time input signal x(n), according to some well-defined rule, to produce another discrete-time signal y(n) called the output signal.
11. What are the classification of discrete-time system?
Ans.
- Static and dynamic systems
- Time-variant and time-invariant systems
- Linear and non-linear
- Stable and unstable systems
- Causal and non-causal systems
- IIR and FIR systems
12. What are the different types of operations performed on discrete-time signals?
Ans. The different types of operations performed on discrete-time signals are
- Delay of a signal
- Advance of a signal
- Folding or reflection of a signal
- Time scaling
- Amplitude scaling
- Addition of signals
- Multiplication of signals
13. What is the property of shift-invariant system? (or) what is a time-invariant system (or) What is a shift-invariant system?
Ans. If the input-output relation of a system does not vary with time, the system is said to be time-invariant or shift-invariant.
If the output signal of a system shifts k units of time upon delaying the input signal by k units, the system under consideration is a time-invariant system.
Example: y(n) = x(n) + x(n — 1)
14. What is a causal system?
Ans. A system is said to be causal if the output of the system at any time n depends only on present and past input, but does not depend on future inputs.
This can be represented mathematically as

Example: y(n) = x(n) + x(n – 1)
15. Define linear system and give example.
Ans. A linear system is one that satisfies the superposition principle according to which the output of the system to a weighted sum of inputs is equal to the corresponding weighted sum of the outputs to each of the individual inputs.
If

then for a linear system

where a1 and a2 are any arbitrarily chosen scalar coefficients.
16. Define (a) Static system (b) Dynamic system
Ans.
Static system: A static or memory less discrete-time system is a system whose output at any instant depends on the input values at that instant but neither on the past nor on the future values of the input
Example: y(n) = ax(n)
Dynamic system: A dynamic or a system with memory is one in which the past inputs or outputs are stored to calculate the present output.
Example: y(n) = x(n) + 3x(n – 1)
17. Define a stable system.
Ans. Any relaxed system is said to be bounded input-bounded output (BIBO) stable if and only if every bounded input yields a bounded output. Mathematically, their exist some finite numbers, Mx and My such that,

18. What is an LTI system?
Ans. An LTI system is one which possess two of the basic properties linearity and time-invariance.
Linearity: An LTI system obeys superposition principle which states that the output of the system to a weight sum of inputs is equal to the corresponding weighted sum of the outputs to each of the individual inputs.
Time invariance: If the input-output relation of a system does not vary with time, the system is said to be time-invariant.
19. Define unit sample response (impulse response) of a system and what is its significance.
Ans. The response or output signal designated as h(n), obtained from a discrete-time system when the input signal is a unit sample sequence (unit impulse), is known as the unit sample response (impulse response).
The output y(n) of an LTI system for an input signal x(n) can be obtained by convolving the impulse response h(n) and the input signal x(n).
20. What is causality condition for an LTI system?
Ans. The necessary and sufficient condition for causality of an LTI system is, its unit sample response h(n) = 0 for negative values of n i.e.
21. What is condition for system stability? (or) What is the necessary and sufficient condition on the impulse response for stability?
Ans. The necessary and sufficient condition guaranteeing the stability of a linear time-invariant system is that its impulse response is absolutely summable
22. What do you understand by linear convolution? (or) What is meant by discrete convolution?
Ans. The convolution of discrete-time signals is known as discrete convolution.
Let x(n) be the input to an LTI system and y(n) be the input of the system.
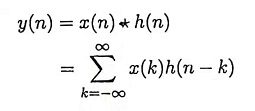
Let h(n) be the response of the system to an impulse. The output y(n) can be obtained by convolving the impulse response h(n) and the input signal x(n)

The above equation that gives the response y(n) of an LTI system as a function of the input signal x(n) and the impulse response h(n) is called a convolution sum.
23. What are the properties of convolution?
Ans.
- Commutative property x(n) * h(n) = h(n) * x(n)
- Associative property [x(n) * h1(n)] * h2(n) = x(n) * [h1(n) * h2(n)]
- Distributive property x(n) * [h1(n) + h2(n)] = x(n) * [h1(n) + x(n) * h2(n)]
24. What are FIR and IIR systems?
Ans.
FIR system: This type of system has an impulse response which is zero outside a finite time interval.
Example: h(n) = 0, for n < 0 and n ≥ N
IIR system: An IIR system exhibits an impulse response of infinite duration.
25. What is the property of recursive and non recursive systems?
Ans.
Recursive system: This type of system has the property that output y(n) at time n is a function of any number of past outputs

Non recursive system: In this kind of system, the output y(n) depends only on the present and past input signal values, i.e.,

26. Define Fourier transform of a sequence.
Ans. The Fourier transform of a finite energy discrete-time signal x(n) is defined as
![]()
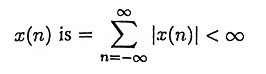
27. What is the sufficient condition for the existence of DTFT?
Ans. The sufficient condition for the existence of DTFT for a sequence
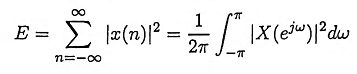
28. State Parseval’s energy theorem for discrete-tune aperiodic signals.
Ans. The Parseval’s energy theorem for discrete-time aperiodic signals is given by
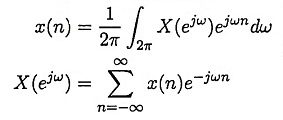
29. Define DTFT pair.
Ans. The Fourier transform pair of discrete-time signals is
30. What are properties of Fourier spectrum of a discrete-time aperiodic sequence?
Ans. The Fourier spectrum of an aperiodic sequence is continuous and periodic with period 2π.
31. What are two basic differences between the Fourier transforms of a discrete-time signal with the Fourier transform of a continuous time signal?
Ans.
- For a continuous signal, the frequency range extends from -∞ to ∞. On the other hand, the frequency range of a discrete-time signal extends from π to π
- The Fourier transform of a continuous signal involves integration, whereas, the Fourier transform of a discrete-time signal involves a summation of terms.
32. Define Fourier transform of a sequence and give its symmetry property.
Ans. The Fourier transform of a sequence is given by
![]()
33. Define the frequency response of a discrete-time system.
Ans.
Consider a class of input sequence x(n) = ejω.
Then
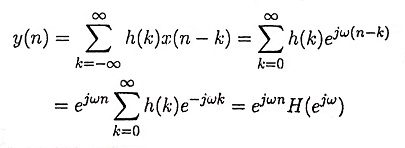
where H(ejω) is called the frequency response of LTI system.
34. What are properties of frequency response H(ejω) of an LTI system?
Ans.
- H(ejω) is a continuous function of ω.
- The frequency response H(ejω) is periodic with period 2π.
- |H(ejω)|, the magnitude function is even symmetric with respect ω = π.
- ∠H(ejω), the phase function is anti-symmetric with respect to ω = π.
35. What is aliasing effect?
Ans. Let us consider a band limited signal x(t) having no frequency component for |Ω| > Ωm. If we sample the signal x(t) with a sampling frequency F < 2 fm, the periodic continuation of X(jΩ) results in spectral overlap. In this case, the spectrum X(jΩ) cannot be recovered using a low pass filter. This effect is known as aliasing effect.
36. State sampling theorem.
Ans. A band limited continuous time signal, with higher frequency fm Hertz, can be uniquely recovered from its samples provided that the sampling rate F ≥ 2fm samples per second.
37. What is an anti-aliasing filter?
Ans. The frequency spectra of real signals do not confined to a band limit Ωm. There are almost always frequency components outside Ωm. If we select sampling frequency F ≥ 2fm using the sampling theorem, the frequency components outside Ωm will appear as low-frequency signals of frequencies between 0 and Ωm/2 due to the aliasing effect and lead to loss of information. To avoid aliasing, we use an analog low pass filter before sampler to reshape the frequency spectrum of the signal so that the frequency spectrum for Ω < Ωm/2 is negligible. This filter is known as anti-aliasing filter.