Types of Power Transmission Drives:
Mechanical power available at the motor shaft has to be transmitted to the driven machine or machines. Various types of power transmission drives are namely,
- Direct Drive
- Belt Drives
- Rope Drive
- Chain Drive
- Gear Drive
- Vertical Drive
1. Direct Drive
In this types of power transmission drives, the driving member is connected direct to the driven member, without any interposed gearing, by means of solid or flexible coupling. It is the simplest method, space required is less than with belt drive and efficiency is 100 per cent. Solid coupling requires very accurate aligning otherwise there is possibility of damage to shafts. Another shortcoming of solid coupling is that sudden jerks of load are transmitted to the motor. By employing flexible coupling both of the above shortcomings are overcome to some extent. Flexible coupling can accommodate some angular, lateral or vertical misalignment. The other disadvantages of direct drive are that (i) end thrust is exerted on the motor by the load if it happens to be a centrifugal pump and (ii) the driving and driven members must run at the same speed, which is usually not desirable. This type of drive is employed where there is a possibility of arranging the driving member in line with the driven member and where speed of driven member is same as that of driving member.
2. Belt Drives
These types of power transmission drives are the least expensive drives. These are employed where a speed change is desired in the transmission of power and where it is not absolutely essential to maintain a fixed speed ratio between the driving and driven shaft. The belt drives are of two types namely (i) flat belt drive and (ii) V-belt drive.
(i) Flat Belt Drive: It is a long distance drive with a limited degree of slip. The belts used for drive are made of hair, woven cotton, rubberized cotton ply, nylon, terylene and leather. The leather belt drive is the most economical type of drive. Vertical belt drive should be avoided to the possible extent. In horizontal belt drive the slack side of the belt should be kept preferably on the top, so that the natural sag increases the arc of contact on two pulleys.
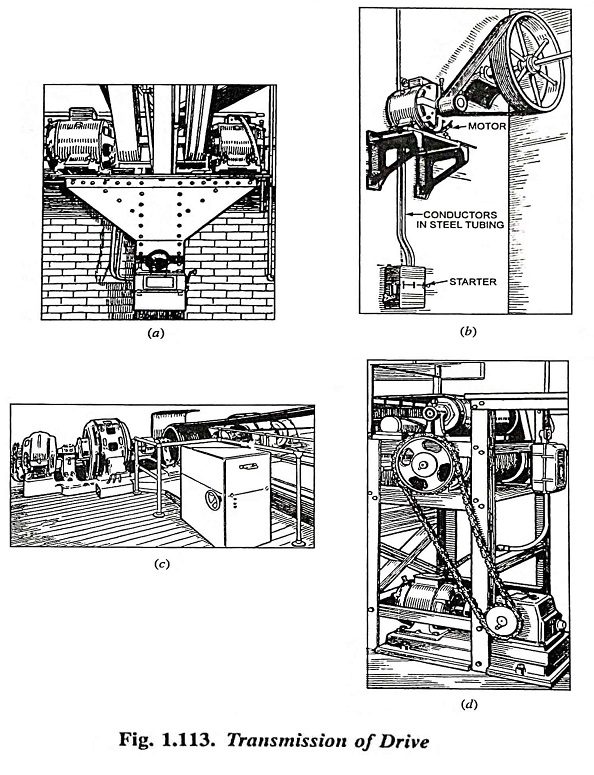
Two motors of 15 kW and 10 kW arranged for flat belt drive are illustrated in Fig. 1.113 (a).
Advantages:
- Greater flexibility in the original design of a plant is possible and new arrangements of old apparatus can be made at any time.
- It provides conveniently any desired speed ratio and permits the use of high-speed motors, which are cheaper than low-speed motors.
- The tendency of slipping, especially under heavy overloads, is often beneficial in that it will absorb a portion of the shock of suddenly applied loads, and thus protect, to some extent, both the driving and driven machines.
Disadvantages and Limitations:
- Considerable space is required and action is not positive. Distance between drive and driven pulley should not be less than four times the diameter of larger pulley. Typical figures for the minimum distance between pulley centres for motors of 22 to 30 kW are about 6 m for a 6 : 1 ratio and about 1.5 m for a 3/2 : 1 ratio.
- Belts exert a side pull on the bearings which results in wear, also loss of power by friction.
- The maximum power which can be conveniently transmitted by means of belts is about 150 to 220 kW.
- The most economical speed has been found to be from 1,000 to 1,500 metres per minute, though practical limitations such as speed of shafting and pulley diameters, often limit belt speeds to much lower values.
Makers of belts and some motor makers publish tables from which the recommended pulley sizes, driving centres and section of belts or ropes can be conveniently calculated. In arriving at the final speed of the driven machine it must not be forgotten that there is always some slip (3 or 4 per cent) in a belt drive.
(ii) V-Belt Drive: It is essentially a short centre, silent drive with a negligible slip (say about 1 per cent). Such type of drive is suitable for motors of ratings up to 450 kW. The power transmitted depends upon the size of the belt, the speed of the belt (limited between 2.5 to 25 m/s), the size of the sheaves, (the larger the sheave, the greater the kW power transmitted) and the arc of contact on the smaller sheave.
The drives should be so designed that the arc of contact on the smaller V-pulley is not less than 90° and more than 130°, as far as possible 12 kW motor with multiple V-belt drive is shown in Fig. 1.113 (b).
3. Rope Drive
Rope drive, the drive by means of ropes running over pulleys having a number of grooves, is used for power ranges beyond the limit of V-belt drive. It is a long centre drive. Main advantages of rope drive are negligible slip and ability of taking sudden loads. Where the speed ratio is very high rope drive is indispensable. This type of drive is coming into use on small and medium sized machines, nowadays.
Coupled motors driving through multiple ropes working in grooved pulleys is shown in Fig. 1.113 (c).
4. Chain Drive
Though chain drive is more costlier than belt and rope drives but it is more efficient, can be used for high speed ratio (the limit being 7:1 with a distance between pulley centres of about 1.5 to 2 times the diameter of the larger pulley) and has no slip. It can be used conveniently for drives involving up to 12 or more parallel shafts; the driving centres can be shorter than with any drive except the direct or gear drive. It is particularly suitable for damp and dirty conditions because the chain case protects the drive from outside influences. With chain drive, it must be ensured that shafts are parallel and chains run centrally on their sprockets at right angle to the shafts to give long life and avoid end thrust on the motor. This types of power transmission drives method is suitable for speeds up to 900 m/minute needing positive drives without any slipping. Chain drive, through reduction gearing, from a 2.5 kW motor is shown in Fig. 1.113 (d).
5. Gear Drive
It is a short centre positive drive. It is very important to have proper alignment in the absence of which, otherwise, we may have to pay in the form of bent motor shafts. It was the first form of power transmission in the early steam driven mills. Modern straight cut gears, and the particular variation found in the worm reduction drive, are common features in many heavy machines such as cloth calenders. A typical 35 kW worm gear with a speed reduction of 15 : 1 will have a mechanical efficiency of about 98 per cent.
6. Vertical Drive
In this types of power transmission drives, motor is arranged with its axis vertical. This arrangement frequently proves to be convenient.