Uncompensated Large Time Constants
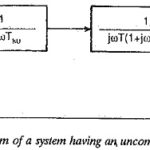
Uncompensated Large Time Constants: It is possible to compensate only one Uncompensated Large Time Constants using a PI controller. A PID controller is used to compensate for two large time…
Continue Reading
Uncompensated Large Time Constants