Proportional Controller:
In many processes, the cycling that occurs with the two position ON—OFF control is undesirable. Steady process controlled in the absence of noises, is possible when the controlled variable is a continuous function of the error. A most widely used form of continuous control mode is the proportional control action, in which a smooth, linear relation exists between the controller output and error. Hence, Proportional Controller can be represented as
![]() where
where
P = controller output, including error
Po= controller output without error (%)
EP = error signal in proportional control action
KP = proportional controller gain or proportional constant between error and controller output (%)
The above equation indicates one-to-one correspondence between Ep and P. The control action can also be expressed in terms of the Proportional Bandwidth (PB), defined as the error required to cause a 100% change in controller output and is usually expressed as percentage of the chart width.
Hence PB = 1/KP x 100%
From the above equations for proportional control action the following can be concluded
- If error is zero, the controller output is constant (=Po).
- In case error signal is present, the proportional controller output needs a correction of Kp% for every 1% error (EP).
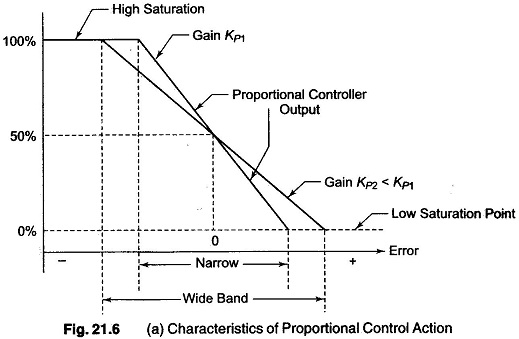
- There is an error band about zero, having magnitude = PB, within which the output is not saturated at 0% or 100%.
The characteristics of a proportional control is as shown in Fig. 21.6 (a).