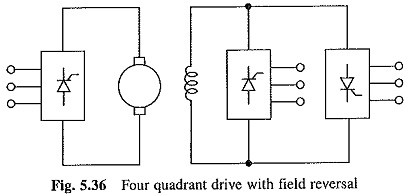
Four Quadrant Drive With Field Reversal:
Four Quadrant Drive With Field Reversal as shown in Fig. 5.36, armature is fed from a fully-controlled rectifier and the field from a dual converter so that field current can be reversed. With field current in one direction, the motor operates is quadrants I and IV. When field current is reverted, it operates in quadrants III and II. The dual converter operates with non-simultaneous control.
The speed reversal is done as follows.
The armature rectifier firing angle is set at the highest value to force the armature current to zero and then firing pulses are withdrawn. The firing angle of the rectifier supplying the field is now set at the highest value. It operates as an inverter and the field current is forced to zero. After a suitable dead time, the second rectifier is activated at the lowest firing angle.
When the field current has nearly settled and the motor back emf has reversed, the firing pulses of the armature rectifier are released so as to set the firing angle at the highest value. Now onwards the current control loop adjust the firing angle continuously to brake and then accelerate the motor at a constant current to the desired speed in the reverse direction.
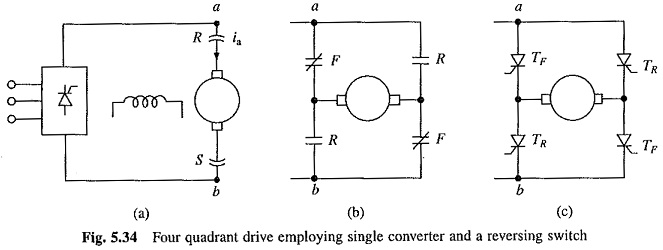
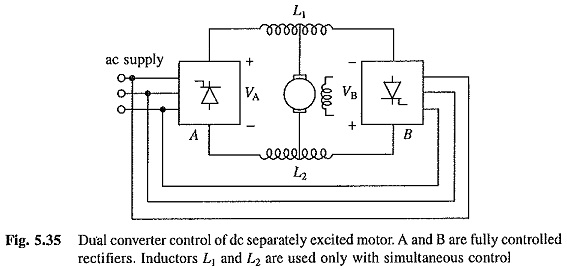
When speed control in wide range is required, field current is also controlled. In armature voltage control schemes of Figs. 5.34 and 5.35, the field is then supplied by either a fully-controlled or a half-controlled rectifier. In the scheme of Fig. 5.36, dual converter is utilized for the control of field current.